
Vision
-
Vision- ビジョン -
ロボット・ソフトウェアを活用し
農業の生産性を向上する
-


-
Mission / Technology- ミッション / テクノロジー -
ロボットを中心としたテクノロジーの力で
農作業に関わる全ての工程を効率化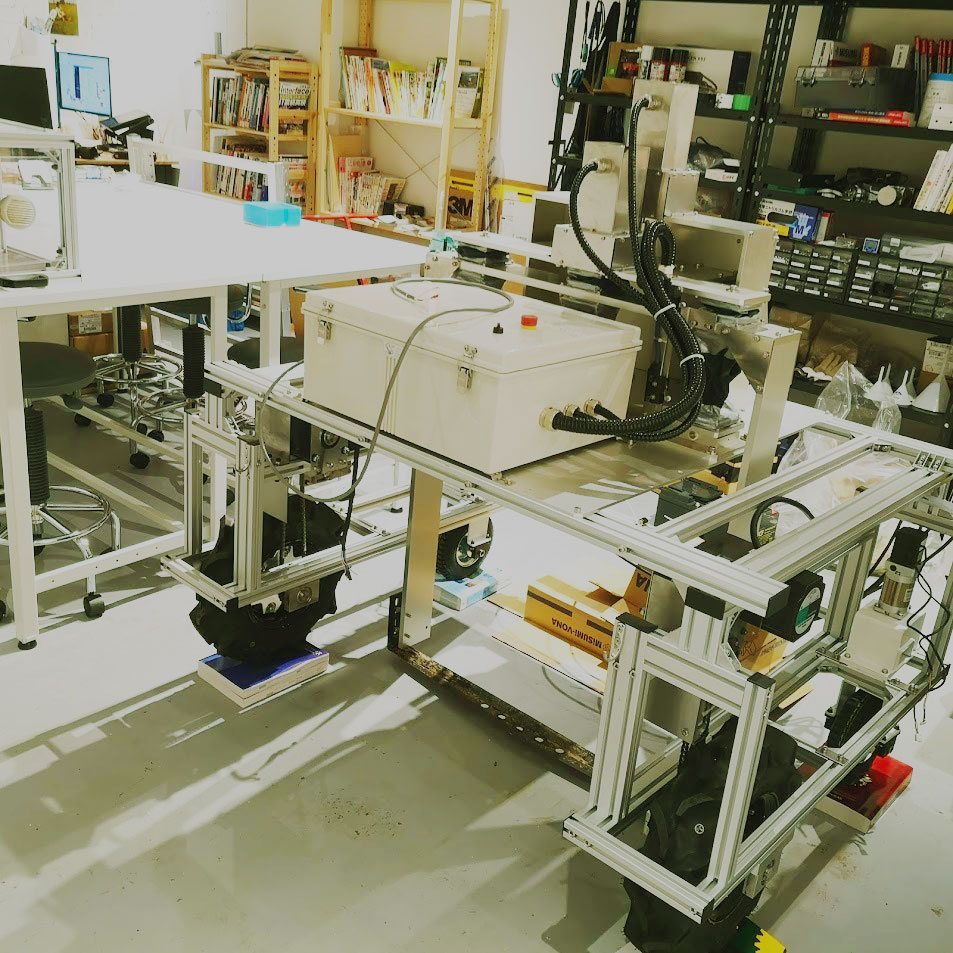
-

-

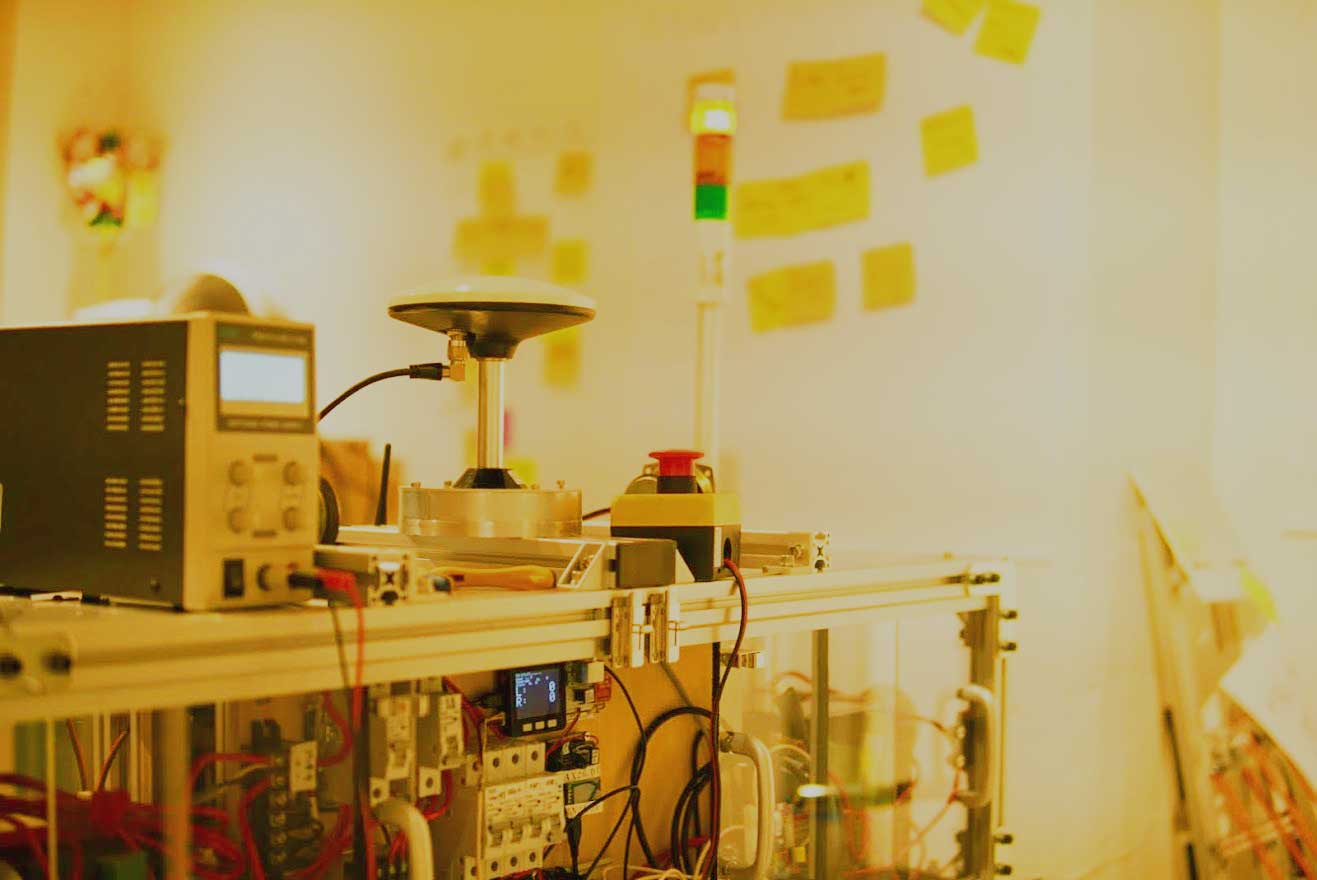
■ GPS
農地での位置情報取得のために、既存のGNSS技術だけでなく、RTK測位や準天頂衛星”みちびき”を活用することで高精度な測位を実現します。
-
■ シミュレーションおよび自律走行
農地のマップをソフトウェア上に展開。そのマップ上でロボットの動きを事前にシミュレーション可能です。実際の⾃律⾛⾏では、地磁気センサやステレオカメラなどの各種センサを活⽤し障害物や周囲の物体を認識しながら⾛⾏します。

Autonomous driving- 自律走行 -
ロボットが効率的に農作業を行うには⾃律⾛⾏が必須です。
レグミンではGPS測位を中心に様々なセンサ類を⽤いることで、⾼精度な⾃律⾛⾏を実現します。
-
Contact- お問い合わせ -
-
サービス・事業に関する
お問い合わせレグミンの農作業ロボット開発・農作業受託サービスに関するご質問等は以下のフォームからお問い合わせください。